



Outdoor Rain Plant
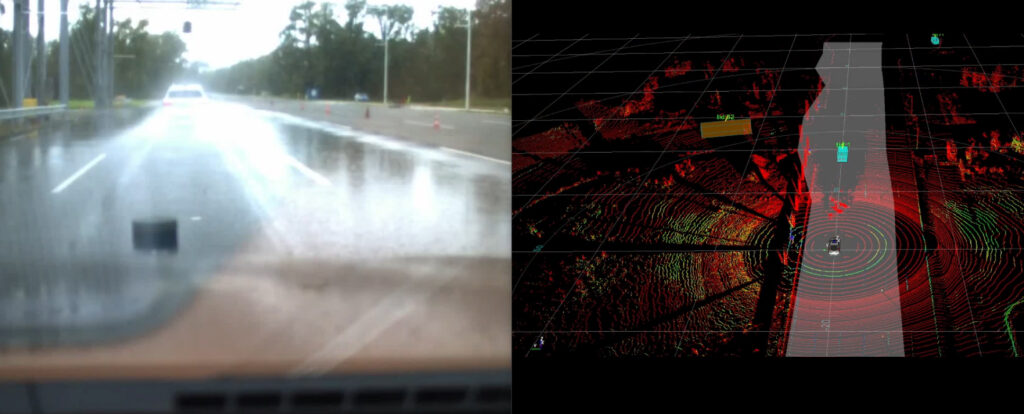
Road weather station provides extensive weather data for the further development of automated driving in rain
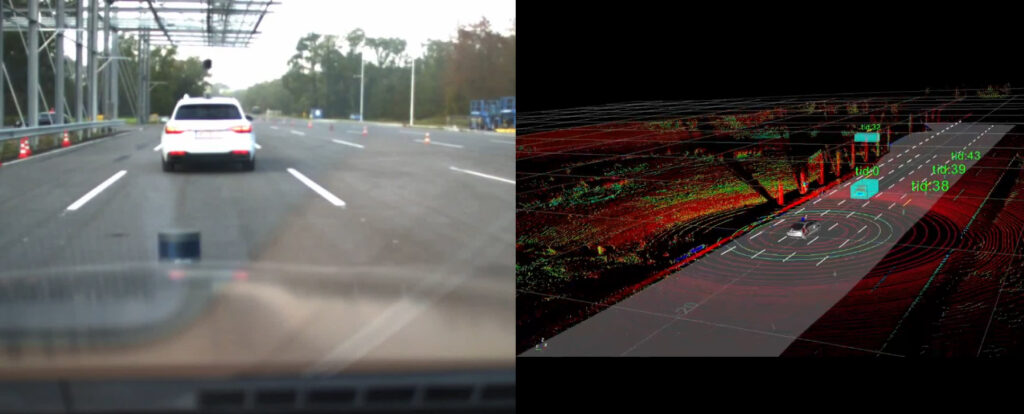
A state-of-the-art road weather station supports the experts with a detailed analysis of the environmental conditions and provides a comprehensive real-time data set of the weather conditions on the Proving Ground in St. Valentin.

Testcenter and Testing
Limitless – 205 km/h with RC model cars on the proving ground in St. Valentin
Two model racers test the limits of their RC model cars – reaching speeds of up to 205 km/h during a speed test at the Digitrans test center on the proving ground in St. Valentin.

Testcenter and Testing
Customized test solutions at Digitrans: From the idea to the evaluation
Whether independently on our test track or with comprehensive support from our experts – at Digitrans we offer flexible options to realize your test projects!