
Road weather station provides extensive weather data for the further development of automated driving in rain
A state-of-the-art road weather station supports the experts with a detailed analysis of the environmental conditions and provides a comprehensive real-time data set of the weather conditions on the Proving Ground in St. Valentin.
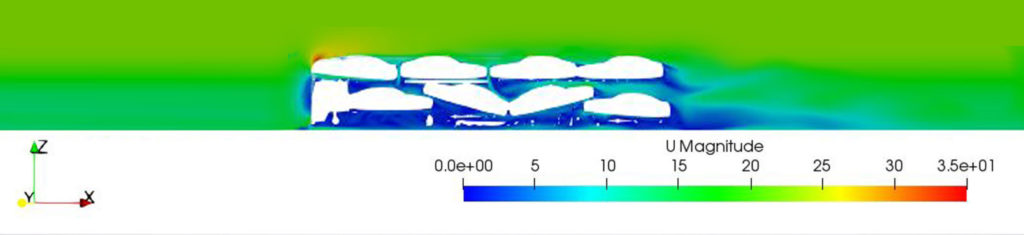
Outdoor rain plant for AD and ADAS testing – Site Visit at Digitrans Testcenter for automated Driving
With the outdoor rain plant in St. Valentin, we are delivering the first system that allows the performance and limits of sensors and algorithms to be tested reproducibly at different rain intensities in a realistic outdoor environment. And that at the touch of a button!

Automated Driving in Austria – AD-Mobility Ecosystem Landscape – Version 2023.01
New version 2023 of the “Autonomous Mobility Ecosystem Landscape Austria” – the map for automated driving in Austria. The map provides an overview of all companies, research and educational institutions as well as current projects and use cases in the field of autonomous driving in Austria.



